Part Design and Implementation of an Arduino-Based Quadcopter Drone for Surveillance Applications
DOI:
https://doi.org/10.60787/ijtec.vol1no1.30Keywords:
Unmanned Aerial Vehicle, Electronic Speed Controller, Lithium Polymer Battery, Slave ControllerAbstract
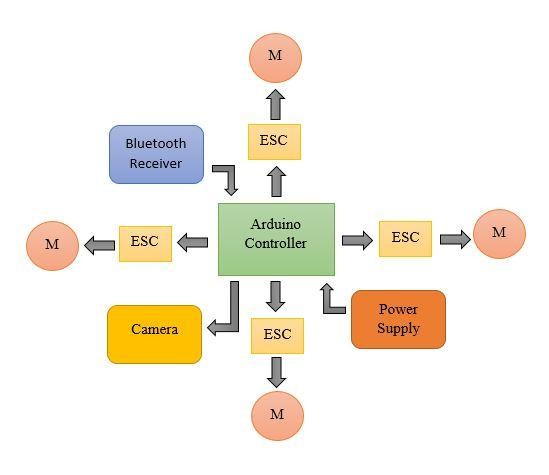
Insufficient surveillance camera in the study area (Delta State University) has led to security risks which includes high number of examination malpractice and theft within the school premises. Students or people can be very deceptive by finding blind spots if CCTV are used in certain locations in the school. Thus, the implementation of a quadcopter is proposed to fly into every area of the University for Surveillance both on a normal day and during examinations. It has the capability for both remote control and autonomous operation. The paper presents the design, application, and future scope of quadcopters. The study aimed to assemble and construct a functional quadcopter drone using Arduino based controller. Arduino IDE functions was used for hardware programming. The assembled quadcopter has four brushless DC motors with 800g weight available for DC Motor to lift with a total current of 1.8A and lasting capacity of 1.94h. The quadcopter reached a maximum altitude of 500cm. The lithium battery capacity was 3500mAh based on weight consideration of the drone. The flight time was estimated to be approximately 45minutes due to the extra power consumption of the controller and camera. The camera resolution was 720p. The quadcopter is deployable as it captures events in real time as images or video recordings.
Downloads
Downloads
Published
Issue
Section
License
Copyright (c) 2025 International Journal of Tropical Engineering and Computing

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.